
上限から1段下降した時のウエーハ とカセットの位置関係
从上限下降一步时晶圆和盒之间的位置关系。
从上限下降一步时晶圆和盒之间的位置关系。
上限から1段下降した時の状態(B) 从上限(B)下降一步时的状态
カセット下限位置での状態(C) 下盒位置的状况 (C)
下限从1段上升时状态(D)( 从下限(D)上升一步时的状态11)卡套上下调整 (11)盒式上下调节
1)ロード卡套上下(图3.4.12(19(15))
1) 上下装载卡套(图 3.4.12 (19 (15))
1)ロード卡套上下(图3.4.12(19(15))
1) 上下装载卡套(图 3.4.12 (19 (15))
a)マニュアルモードにて a) 在手动模式下
をキーインし、カセットを上限まで上昇さ せる。 将盒式磁带提升到上限。
| 1 | 0 | 復改 复改 |
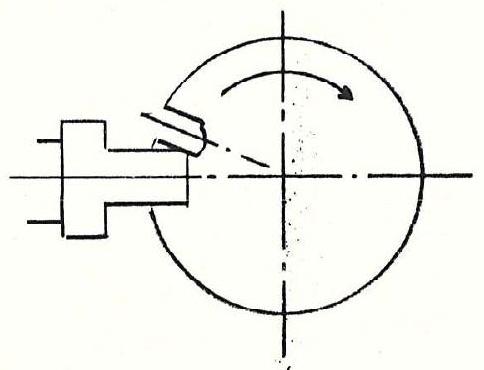
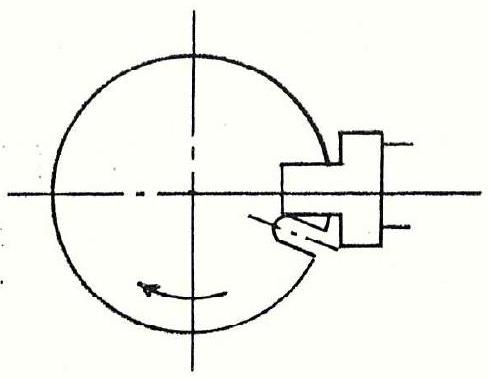
b)との時のセンサー(19)とロータ(15)の位置関係が上から見て、左図の状態(A)になってい ることを確認する。
b) 确认传感器(19)与转子(15)的位置关系处于左图所示的(A)状态。 c)卡组最下段にウエーハをセットする。
b) 确认传感器(19)与转子(15)的位置关系处于左图所示的(A)状态。 c) 将晶圆设置在卡组的底部。
b) 确认传感器(19)与转子(15)的位置关系处于左图所示的(A)状态。 c)卡组最下段にウエーハをセットする。
b) 确认传感器(19)与转子(15)的位置关系处于左图所示的(A)状态。 c) 将晶圆设置在卡组的底部。
d)
d)
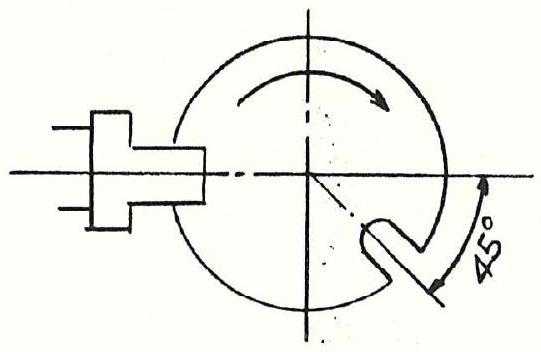
をキーインし、1段下降させる。この時、LED 1 (基板PBI L1)が消灯し(遮光)、最下段部の中間 にウェーハが位置していることを確認する。
键入并降低一个台阶。 此时,LED 1(基板的 PBI L1)关闭(停电),以确保晶圆位于底级中间。
d)
| C | 1 | 3 | 復改 复改 |
键入并降低一个台阶。 此时,LED 1(基板的 PBI L1)关闭(停电),以确保晶圆位于底级中间。
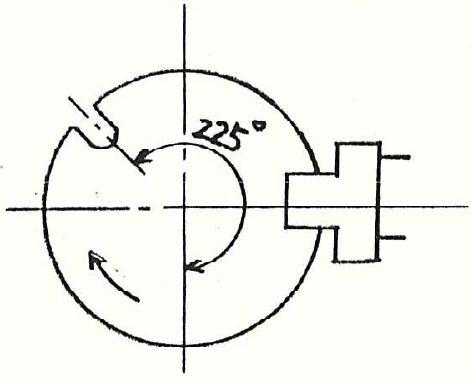
e)また、との時のセンサー(19)とロータ(15)の位置関係が上から見て、左図の状態Bルてなっ ていることを確認する。
e) 此外,从上方看时,确认传感器(19)和转子(15)之间的位置关系处于左图的 B 状态。
e) 此外,从上方看时,确认传感器(19)和转子(15)之间的位置关系处于左图的 B 状态。
f)
ト1、2を回転させウエーハがカセットか ら搬出されることをチェックする。
旋转 T 1 和 2 以检查晶圆是否以盒的形式取出。
| B | 1 | 0 | 復改をキーインして、ベル 键入修复,铃铛 |
旋转 T 1 和 2 以检查晶圆是否以盒的形式取出。
g)检查后、
g) 检查后,键入
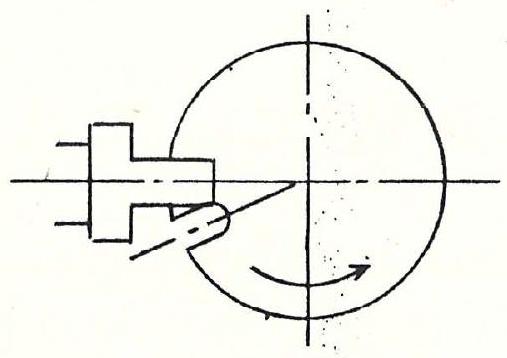
打开重复,反向旋转皮带 1 和 2,然后再次将晶圆存储在盒中。 卡片组不断下降。 检测到下限位置后,自动上升一步,所以
g) 检查后,键入
打开重复,反向旋转皮带 1 和 2,然后再次将晶圆存储在盒中。 卡片组不断下降。 检测到下限位置后,自动上升一步,所以
| C | 1 | 3 | 復改をキーインして1段下降 键入和 1 个降步 |
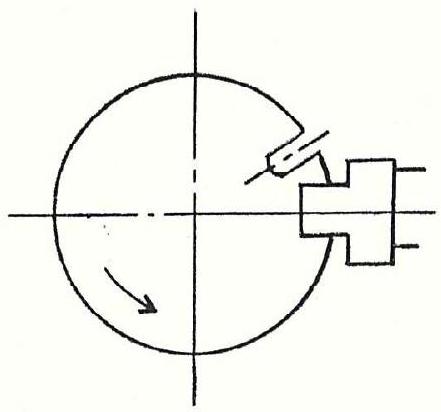
i)この時のセンサー(19)とロータ(15)の位置関係が、上から見て左図の状態C)になってい るととを確認する。
i) 确认此时传感器(19)和转子(15)的位置关系从上方看时处于左图中 C)的状态。
i) 确认此时传感器(19)和转子(15)的位置关系从上方看时处于左图中 C)的状态。
j)
昇させる。 提升。
| C | 1 | 2 | 復 改 をキーインし、 1 段上 键入复职,更上一层楼 |
バッファ室側ウエーハを 缓冲室侧晶圆
をキーインするととによりカセットに収納 させる。 键入后,您可以将其存储在盒式磁带中。
| B | 1 | 1 | 1 |
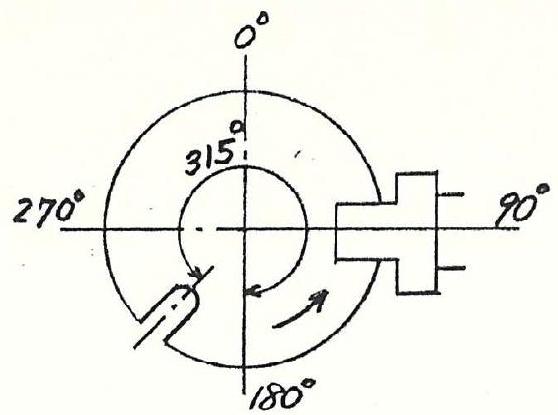
この時に、LED1が消灯し(遮光)、最上段の中間にウエーハが位置していると とを確認する。
此时,LED 1 熄灭(停电),确认晶圆位于顶行中间。
k)またとの時のセンサー(19)とロータ(15)の位置関係が上から見て、左図の状態(D)になっ ているととを確認する。
k) 确认传感器(19)和转子(15)之间的位置关系从上方看时处于左侧所示的状态(D)。
此时,LED 1 熄灭(停电),确认晶圆位于顶行中间。
k)またとの時のセンサー(19)とロータ(15)の位置関係が上から見て、左図の状態(D)になっ ているととを確認する。
k) 确认传感器(19)和转子(15)之间的位置关系从上方看时处于左侧所示的状态(D)。
1)
1、2を回転させ、カセットからウエーハ が搬出されることをチェックする。
旋转 1 和 2 以检查晶圆是否已从盒中取出。
| B | 1 | 0 | 復改をキーインしてベルト 在康复带上键入 |
旋转 1 和 2 以检查晶圆是否已从盒中取出。
m)中段についても同様にチェックしていく。 m) 以同样的方式检查中间行。
カセット上限位置での状態Ⓔ 上盒位置的状况 (E)
上限から1段下降した時の状態(F) 从上限(F)下降一步时的状态
カセット下限位置での状態(G) 下盒位置的状况 (G)
下限から1段上昇した時の状態(H) 从下限(H)上升一步时的状态
2)アンロードカセット上下 (図3.4.12(19)(15))
2)上下料盒(图3.4.12(19)(15))
2)上下料盒(图3.4.12(19)(15))
a)マニュアルモードにて a) 在手动模式下
をキーインし、カセットを上限まで上昇さ せる。 将盒式磁带提升到上限。
| C | 2 | 0 | 復 改 复改 |
b)この時のセンサーとロータの位置関係が上から見て、左図の状態(E)になっているこ とを確認する。 c)卡组最下段にウエーハをセットする。
b) 检查此时传感器与转子的位置关系是否处于左图所示的状态(E)。 c) 将晶圆设置在卡组的底部。
b) 检查此时传感器与转子的位置关系是否处于左图所示的状态(E)。 c) 将晶圆设置在卡组的底部。
d)
をキーインし、1段下降させる。 键入并降低一个台阶。
| C | 2 | 3 | 復改 复改 |
この時、LED1(基板 PBIL 2)が消灯し(遮光)最下段部の中間にウェーハ が位置していることを確認する。
此时,LED 1(基板 PBIL 2)关闭(阴影)以确认晶圆位于底层的中间。
e)また、との時のセンサーとロータの位置関係が上から見て左図の状態(F)になってい ることを確認する。
e) 另外,确保传感器和转子之间的位置关系处于从上方看时左侧所示的状态(F)。
此时,LED 1(基板 PBIL 2)关闭(阴影)以确认晶圆位于底层的中间。
e)また、との時のセンサーとロータの位置関係が上から見て左図の状態(F)になってい ることを確認する。
e) 另外,确保传感器和转子之间的位置关系处于从上方看时左侧所示的状态(F)。
f)
ト4、5を回転させウエーハがカセットか ら搬出されることをチェックする。
旋转 T 4 和 5 以检查晶圆是否以盒的形式取出。
| B | 4 | 0 | 復改をキーインして、ベル 键入修复,铃铛 |
旋转 T 4 和 5 以检查晶圆是否以盒的形式取出。
g)检查后、
g) 检查后,
g) 检查后,
h)其次、
カセットを連続下降させる。下限位置を検出後自動的に1段上昇するので、
连续降低盒式磁带。 检测到下限位置后,自动上升一步,所以
| C | 2 | 1 | 復改をキーインして、 键入修复体, |
连续降低盒式磁带。 检测到下限位置后,自动上升一步,所以
C 23 3復改をキーインして1段下降 (下限)させる。
C 23 键重复 3 次并降低一步(下限)。
i)との時のセンサーとロータの位置関係が上から見て左図の状態(G)になっているとと を確認する。
i)并确认传感器与转子之间的位置关系从上方看时处于左图所示的状态(G)。
C 23 键重复 3 次并降低一步(下限)。
i)との時のセンサーとロータの位置関係が上から見て左図の状態(G)になっているとと を確認する。
i)并确认传感器与转子之间的位置关系从上方看时处于左图所示的状态(G)。
j)
昇させる。 提升。
| C | 2 | 2 | 復改をキーインし、 1 段上 键入重复和更上一层楼 |
バッファ室側ウエーハを、|B|
缓冲室侧的晶圆通过键入 |B|
缓冲室侧的晶圆通过键入 |B|
この時に、LED1が消灯し(遮光)、最上段の中間にウエーハが位置していると とを確認する。 k)また、との時のセンサーとロータの位置関係が上から見て左図の状態(H)になってい るととを確認する。
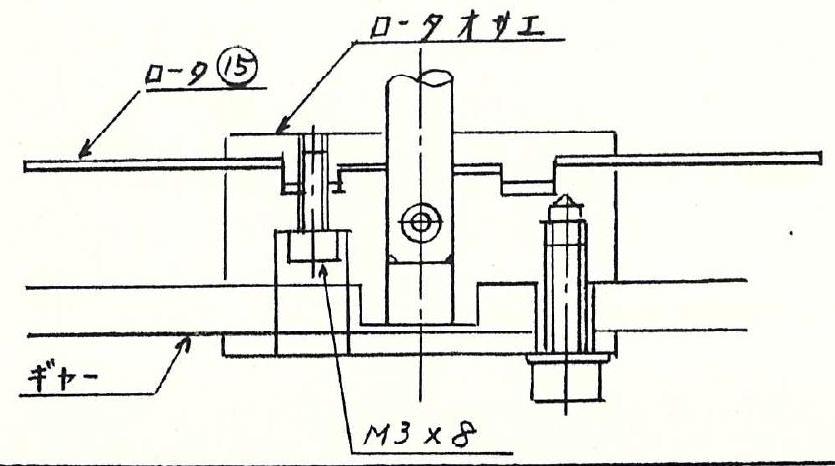
1)中段についてあ同様にチェックしていく。 m)ロータ(15)取付角度调整要领。(左图)
M
1)中段についてあ同様にチェックしていく。 m)ロータ(15)取付角度调整要领。(左图)
M
調整後ボルトを締め付ける。 调整后,拧紧螺栓。